Previous Work
3D Modeling and Polygon Reduction
An International Polar Year (IPY) project working on the effect of reducing the number polygons of 3D input models of birch trees (Figure 1) for use in a Monte Carlo Ray Tracing Algorithm. Under the supervisation of Doctor Mathias Disney, this masters degree thesis involved a two week stay at the Abisko Scientific Research Station (ANS) in northern Sweden conducting field work to obtain measurements of birch trees. These measurements were used to create 3D polygon models with OnyxTree and then using a ray tracing model (created by Professor Philip Lewis of UCL) a measure of reflectance is achieved. In order to create a model such as Figure 1(b), 14,678 polygons are required which subsequently has an effect on the time taken to render the model.

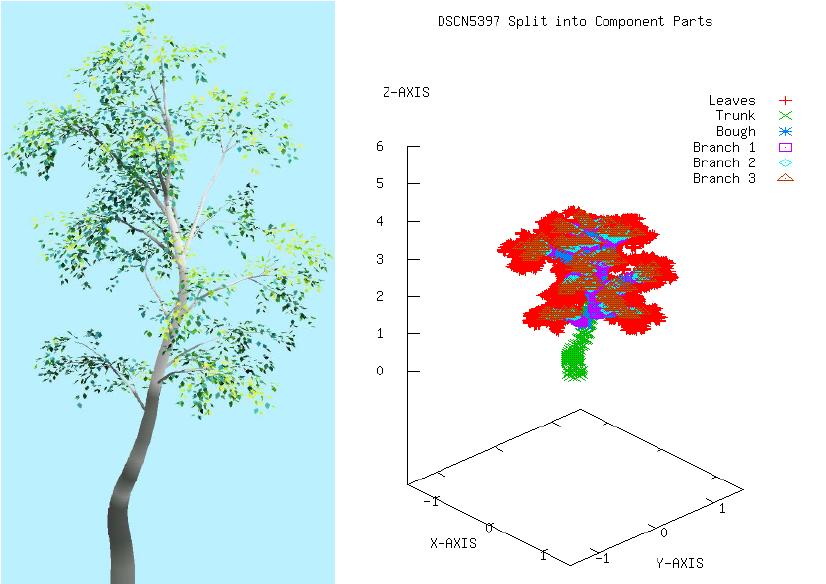
Figure 1 (a) Left: Image DSCN5397 of a birch tree (b) Middle: OnyxTREE Broadleaf screenshot of model DSCN5397 (c) A graph showing DSCN5397 split into its component parts and displayed separately.
When working on a larger model of a forest this time increases greatly so polygon reduction techniques were used increase performance. The effect of the reduction on the reflectance was observed significantly when reducing the number of polygons representing the leaves, allowing for greater reductions in the trunk and branches.
LIDAR modeling
Using LIDAR data taken at the UCL portico with a Leica HDS3000 3D Laser scanner supplied by Plowman Craven (PCA) during an Open day at UCLs Geomatic Engineering Department, two scans were taken (Figure 2(a) and (b)). This data was then co registered and combined to create a 3D model.
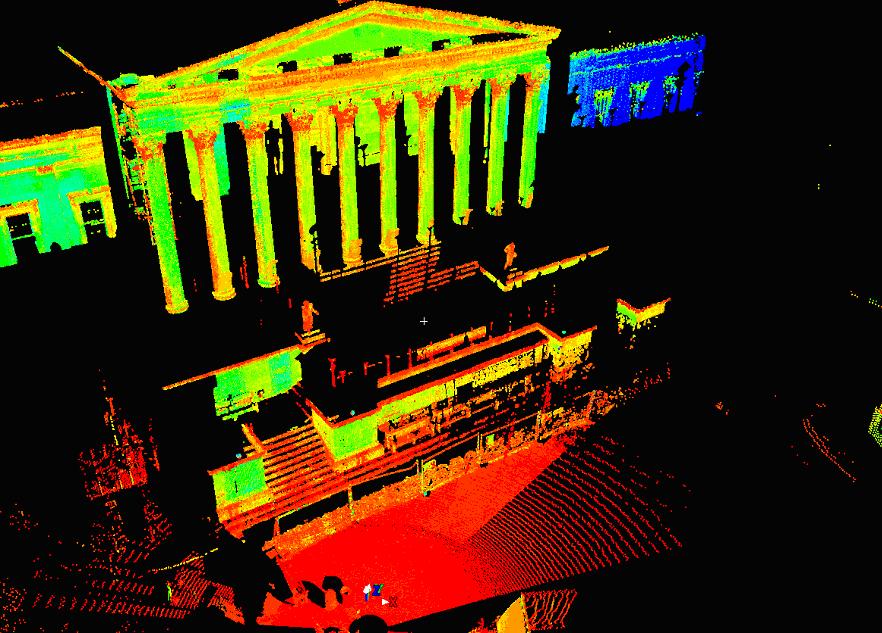
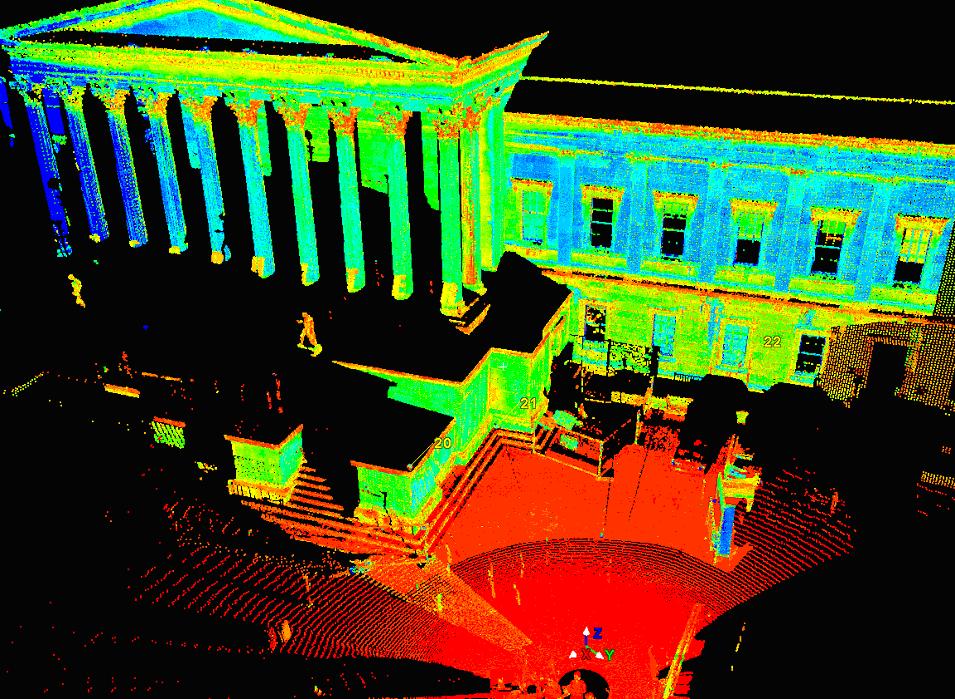
Figure 2 (a) Left: HDS3000 am scan (b) Left: HDS3000 pm scan
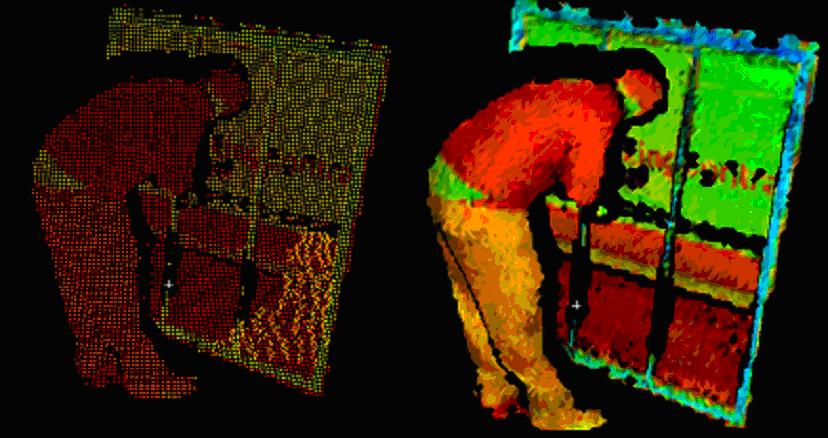
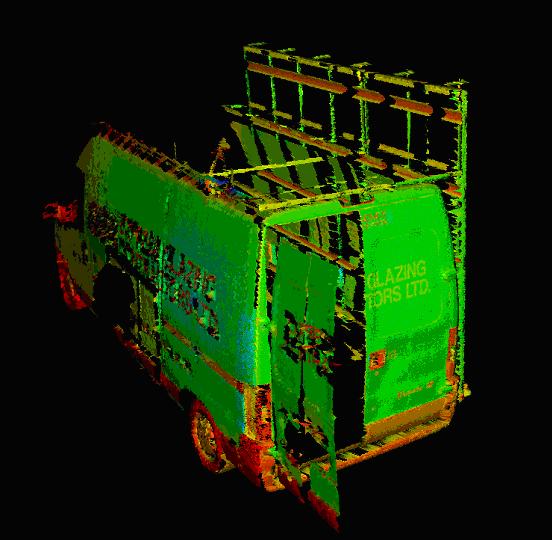
Figure 3 (a) Left: LIDAR Image taken of a glazer replacing a cracked window (b) Middle: 3D mesh of LIDAR model (c) Right: 3D mesh of the glazers van.
From the combined data, an analysis of the co registration is performed along with a certain level of 'cleaning'. This largely is in the form of data 'noise' from people walking through the scene as the scans take place. By removing these points, a clear model can be created of specific regions of the scene, such as a glazer fixing a window beside a work van (Figure 3(a), (b) and (c)).
Motion tracking software
A final year project at the University of Nottingham for the completion of my Computer Science BSc involved the creation of motion detection software that could automatically locate an object in a video clip and continually track it. Given a detected object (Figure 4 (a) and (b)), various methods of object classification can be explored.


Figure 4 (a) Left: Image taken with three seagull manually highlighted (b) Right: Motion detection algorithm output.